
这届广州车展华系车真正走到了舞台的中央。以造车新势力和头部传统中国品牌为首的华系阵营带来了很多新意:小鹏汽车品牌换新后带来了充电5分钟补能200+km的小鹏G9,沙龙机甲龙(配置|询价)往车上塞了4个激光雷达,长安、华为、宁德时代的合资品牌车型阿维塔11玩起了情感智能...从在场的观众聚集情况不难看出,科技感十足的这些产品胜过了往日BBA对大家的吸引。

而新势力车型除了新能源化这个大趋势外重要的是向智能化发展,其中这两年智能驾驶的发展有了阶段性进步逐渐走入量产阶段,我们能开到的车也将从标准的L2级驾驶辅助能力逐渐发展到无限接近L3级的驾驶辅助能力,在目前我们更习惯称之为“高阶智能驾驶”。在当下往后三到五年看高阶智能驾驶的下一站,除了我们熟知的激光雷达,各个智能汽车还在比拼什么?

高阶智能驾驶的发展很难绕过激光雷达这个硬件。在往自动驾驶发展的道路上从一开始就形成了两个流派:以特斯拉为代表的视觉感知派和目前大部分车企采用的激光雷达方案,前者依赖高清摄像头+毫米波雷达的组合(甚至摆脱毫米波雷达),后者融合高清摄像头、超声波雷达、毫米波雷达和激光雷达。显而易见,前者成本能做到很低,但后者的融合感知能力更强,虽然特斯拉宣称仅依靠更强大的视觉识别能力就能实现等同甚至超越雷达感知的方案,但目前阶段尚未验证这一结果。

虽然说不清小鹏P5(配置|询价)和极狐阿尔法S HI版谁才是全球首款搭载激光雷达的量产车型,但从那时候开始有关于激光雷达的内卷就已经开始了。在这次广州车展亮相的搭载激光雷达的车型里,就有上汽智己R7、沙龙机甲龙、广汽埃安AION LX(配置|询价) Plus、北汽极狐阿尔法SHI版、小鹏P5、蔚来ET7、哪吒S、威马M7、智己L7等车型。而数量的内卷也随之开始,从小鹏P5的2个到威马M7的3个再到沙龙机甲龙的4个。从宣传话术上给人的感觉是:激光雷达的数量越多,能够实现的辅助驾驶能力越强。

是,也不是。理论上讲,更多的激光雷达能够覆盖更多的角度,以搭载4个激光雷达的沙龙机甲龙为例,其4个激光雷达分别布置在了前杠的左中右和后杠的中间,几乎覆盖了平面角度的360°。这里面尤其值得注意的是车辆的侧面角度,之前发布的搭载激光雷达的车型在侧面障碍物识别时可能还要更多地去依赖环视摄像头+毫米波雷达,而更多的激光雷达确实照顾到了这个盲区。不过覆盖面更全数量更多的激光雷达只能保证的是在更全的视角下它具备这个能力,而具体识别效果能否达标尚待考证。在量产汽车上4个是不是激光雷达上车的上限?我们不知道,或许未来随着激光雷达技术的提升和成本的进一步下降,它或许会像现在的毫米波雷达一样遍布全车。

除了数量的比拼,这次广州车展广汽埃安还打出了代际的概念。据官方宣称,AION LX Plus搭配了第二代激光雷达,称为“智能可变焦激光雷达”,而其他车型搭载的都是第一代机械式棱镜激光雷达。从功能上看,最大的区别在于分辨率和刷新频率两个维度,这两个维度影响着激光雷达的采集率,也是考验激光雷达性能的重要指标。

图片源于网络
由于具备智能可变焦功能,第二代激光雷达分辨率可以在0.2°-0.05°智能调控(主流第一代固定0.2°),针对不同场景下可以自适应切换,高速路况下低分辨率可实现更远的感知距离做到提前应对,低速路况下高分辨率可以实现更广的视野,以应对变化复杂且快的路面情况。
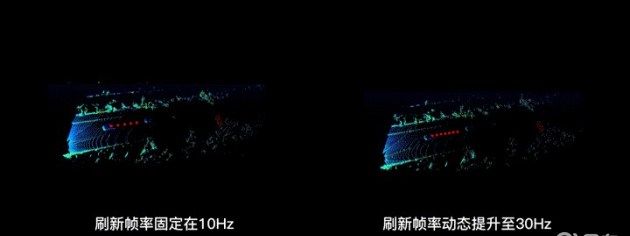
而刷新频率这个概念和我们手机电脑的显示器有些类似,越高的刷新频率对路况变化的识别能力就越高,所以在遇到鬼探头、加塞等时间较短的突发路况时可以更快地识别反应。此外,据官方宣称,第二代激光雷达在成本和体积上也有很大的优势。第一代还没落地,第二代就已经亮相,不知道二代正式投产使用后能否在效果上和一代拉开代际的差距。

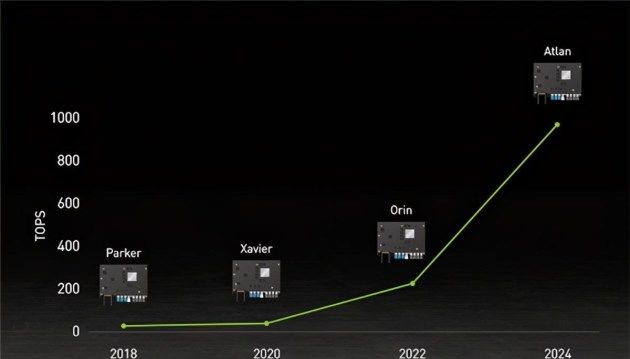
感知、决策、执行,自动驾驶的三板斧。通过激光雷达(眼)感知到的信息就要通过自动驾驶平台这个大脑来运算了,于是乎,在近期的智能汽车宣传上我们又见到了一个数据上的比拼:自动驾驶平台算力。每每看到在相关信息描述上总会提到的XX TOPS的算力,总会让人下意识觉得数字越大能力越强,甚至将其作为自动驾驶能力的主要评判标准,从几十的TOPS甚至到1000+TOPS,算力数字跨越如此之大,到底现阶段多少TOPS算高?
其实一定程度上这里面存在着概念的混淆,首先要搞清楚在很多车型上自动驾驶平台芯片和智能座舱芯片是两个单独的芯片,各自负责不同域的平台计算,这里说的是自动驾驶平台的算力;然后是综合算力数字的大小,因为在一些车型上应对自动驾驶平台应用了多块芯片,宣称的综合算力其实是多块芯片算力的叠加值。

然后是关于算力本身,虽然目前业界开始了关于算力的攀比,但实质上平台算力并不是影响自动驾驶能力的唯一因素,芯片计算效率也同样需要关注。每秒准确识别帧率MAPS(单位: FPS)才是更真实的性能指标。
业界有个不成文的公式,总结了从L2到L5自动驾驶所需的算力:
L2需要的算力ont>;
L3需要的算力为30~60 TOPS;
L4需要的算力>100 TOPS:
L5需要的算力目前未有明确定义(有预测需要至少1000 TOPS)。

以目前亮相的新车看其实有很大部分产品的算力是高度冗余的,当然如果抛却成本的考量冗余算力不是坏事,但也说明了其实自动驾驶能力的高低不会受到算力大小的影响太多。举个例子,小鹏P5的自动驾驶平台算力是30TOPS,特斯拉最新的AP3.0算力是144TOPS,都算不上高,但二者现阶段的辅助驾驶能力却处于业界领先。高阶智能驾驶的性能并不单单由硬件决定,还需要软件、算法等方面的配合,因此算力的比拼并不能成为自动驾驶能力的判断标准。
目前在智能汽车发展路径上很有意思的一点是,新势力车企诸如特斯拉、小鹏等都在朝着单车智能而努力,而传统车企例如福特、上汽等却在押注5G+V2X,走多车智能车路协同路线。

5G+V2X分开看很好理解,前者就是我们熟悉的5G,是大体量数据高效率低时延传输的通讯基础;V2X(车连接万物),即车和外界环境进行信息互换的一种通信技术。而这一技术不仅要求车辆能够发送和接受信息,还需要外界环境也有智能化的设备作为支撑,才能够完成V2X等一系列的操作。

从长远看,5G+V2X是未来自动驾驶甚至智慧交通场景下必不可少的路径,车辆只是作为其中的一个参与者而已,且实现效果确实诱人:
智慧交通信息服务-V2I:红绿灯信息推送/停车起步引导/闯红灯预警/车速引导。
智慧道路信息服务-V2I:弯道速度预警/减速区预警/前方道路施工提醒/道路标志牌下发/道路拥堵提醒/关键路段提醒/潮汐车道提醒/限速提醒。
安全预警类服务-V2V:紧急刹车预警/故障车辆提醒/交叉路口冲突避免/紧急车辆警示/左转辅助。
协同控制类服务:智能ACC控制。

甚至能弥补现阶段我们看到的单车智能路线的短板,但至少短期内这个技术落地的可能性很小,也正是因为它涉及到方方面面的智能化终端改造,路面上的其他车必须智能,红绿灯、道路甚至摄像头都必须智能联网,这是一个缺了谁也不能完美实现的大体系,还需要整个生态的协同发展。
总结:
在很长一段时间内,量产车在自动驾驶发展路径上仍将处于无限趋近L3级别的能力范畴,随着芯片能力、5G、雷达等智能硬件水平的快速提升,用户实际体验感受也将得到大幅升级。这一阶段的高阶智能驾驶辅助水平高低除了上述几个大的关键点外,高精地图、全栈自研等方面因素也会对落地结果有一定的影响,但主要的竞争领域仍保持上这几个大方面上,但最终体验感的优劣仍是软硬件结合能力的综合影响,但在逐渐明朗的大趋势下,更完善强大的智能辅助驾驶非常可期。